Robots coming to the aid of aircraft technicians
Aircraft inspections can be tedious. They require highly trained technicians with a sharp eye to detect defects. Aircraft inspections can also be difficult. Some defects are very small or hidden and difficult to detect, with or without inspection tools like mirrors, looking glasses, multi-meters, non-destructive testing devices, and so on. Royal NLR has spent the last years searching for technological solutions to improve the detection of multiple defect types using multi-sensor technology and automated defect recognition software.
The challenge
Aircraft inspections are a large part of the aircraft maintenance activities. The challenge is, to develop novel methods to cover the many defect types. These defects may include obvious defects such as nicks an gauges, but it may also include the detection of leaks and missing nuts and bolts.
However, aircraft inspections are not only very diverse. There are many areas, systems and components that require inspection, and each may fail in different ways. The challenge is, to find very different defects in very different materials in very different parts of the aircraft.
The other difficulty is the technology to inspect these parts of the aircraft. There is not a single sensor to scan all parts of the aircraft and detect all thinkable defects. And from a productivity point-of-view, it makes no sense to hand-carry these sensors through the aircraft or to manually analyze the scans or images. The challenge is, to develop systems that can perform these inspections autonomously.
In other words, the challenge is to inspect aircraft with autonomous universal robots that can detect a multitude of defects in many different settings. NLR investigates the use of multi-sensor technology and advanced defect detection algorithms.
The solution
Royal NLR has worked on maintenance technology to perform autonomous robotic aircraft inspections. NLR is developing autonomous robots for inspection purposes, comprising of:
- One or more sensors to scan the object
- A robot to move the sensors to the right locations around the object
- Advanced defect detection algorithms
- Automation technology to autonomously perform the prescribed inspections.
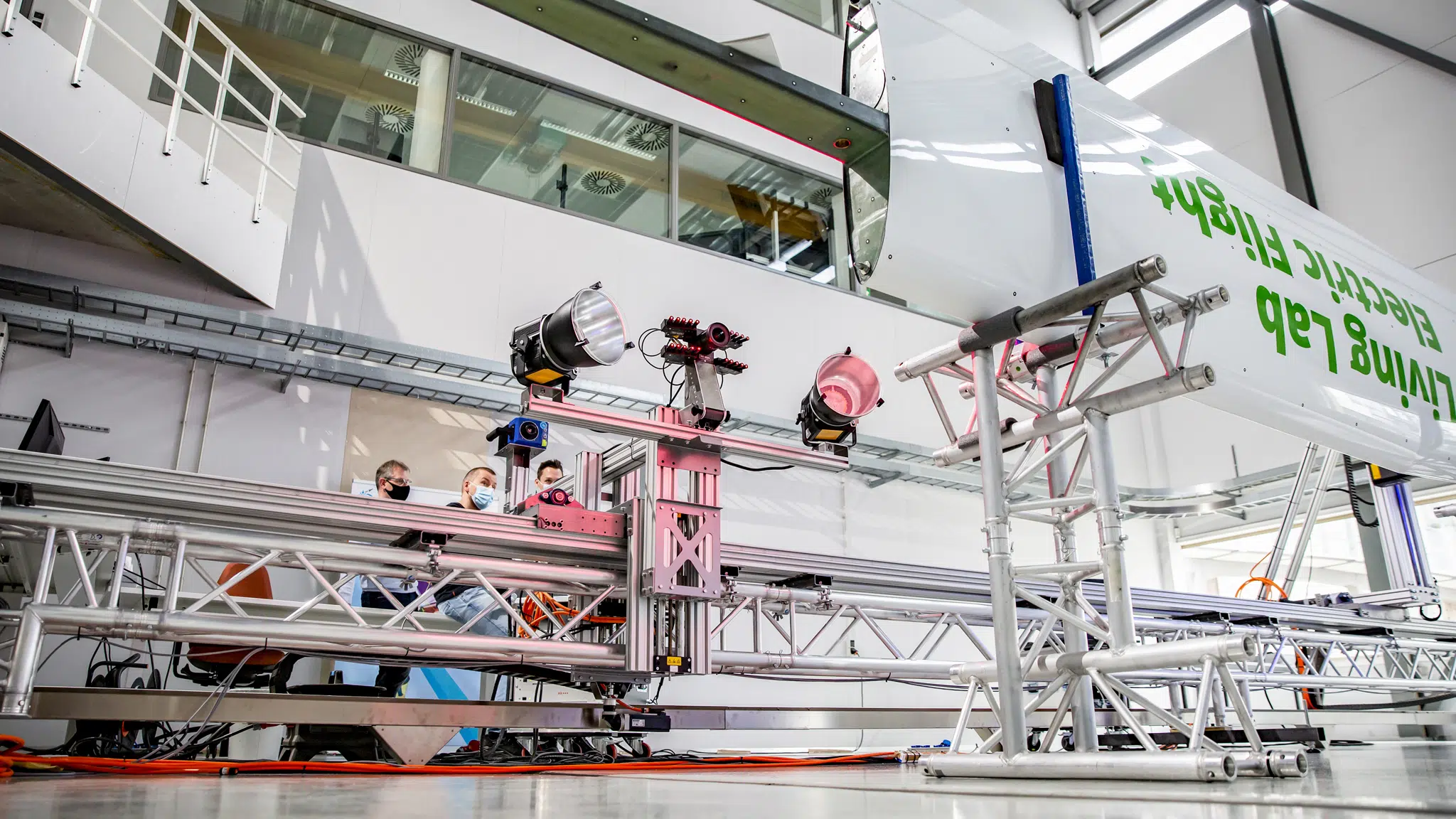
One of our test rigs is the Autonomous Robot for Aircraft Inspections. The working range of this particular test rig is suitable to inspect fuselage panels, wing sections, and helicopter main rotor blades. The test rig can be fitted with multiple sensors to inspect for example composite structures for delamination, skin-to-core unbonds, and so on. In the background, our algorithms detect defects. And our algorithms not only detect these defects, our algorithms also classify and measure the size the defects. The software compares the actual sizes against the allowable damage limitations.
What did we do
The test rig is part of our efforts to develop maintenance technology to improve productivity and to make the working environment for aircraft technicians more interesting. We focused on the automation of inspections. We reckoned that we needed sensors, robots and automation technology to inspect aircraft and components for damages.
NLR studied these areas over the last years. We looked at the suitability of sensors, the capabilities of robots, autonomous systems and the integration of these building blocks into an autonomous inspection robot. In the process we learned a lot, especially about complexity of inspection systems. It goes way beyond the installation of a camera at the tip of a robot arm.
It also means that there is a lot of work that needs to be done. The inspection of one part of an aircraft for one defect is relatively simple and it seems feasible to bring these systems to the market in a relatively short period of time. However, universal solutions with a large degree of autonomy will take more time to develop.
