Urban Air Mobility (UAM) concepts, such as flying taxis and package delivery drones, are increasingly viewed as an essential component of future transportation systems. But before UAM flights can occur on a meaningful scale, several challenges need to be tackled including airspace integration. Recognising the need to address this challenge, several initiatives are underway worldwide to develop the new Unmanned Traffic Management (UTM) services needed to facilitate UAM flights. In this context, the European Commission has initiated the European U-space UTM system. U-space development has been divided into four distinct phases named U1-U4 where the complexity of the resulting operations are gradually increased.
The challenge
The goal of the Metropolis 2 project was to investigate the separation management architecture that is needed to achieve high density UAM and drone operations in urban areas for a future U-space U3/U4 system. The aim was to develop an architecture that took into account interactions between the following aspects: airspace design, flight planning, strategisch deconfliction and tactical deconfliction between drones in U-space airspace.
The solution
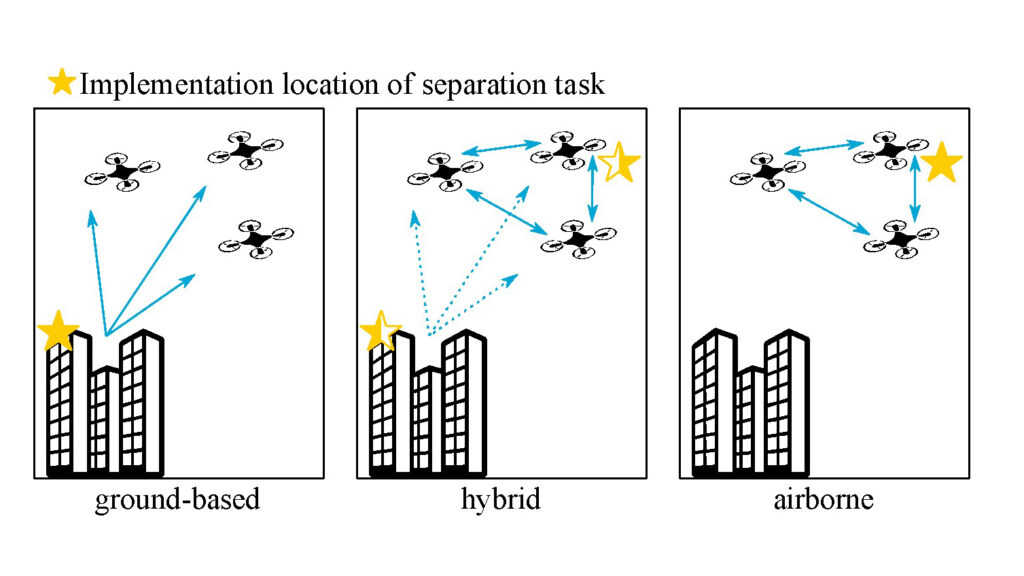
Three different architectures for separation management were tested, a) centralised ground-based, b) decentralised air-based and c) hybrid. The concepts were tested using fast-time simulations for a large number of different traffic volumes for the city of Vienna. This included densities of up to 5000 drones over Vienna over a period of one hour. The simulations were performed using the BlueSky fast-time simulator.
What did we do?
NLR led the project subteam that developed and simulated the Hybrid concept. The results of the simulations indicated that the Hybrid architecture resulted in the highest safety and capacity. It is recommended that U-space implementations for urban areas adopt such a hybrid architecture that containts both ground-based centralised control for flight planning and airbased tactical control for
dealing with conflicts as a result of uncertainties such as wind. The airspace design needs to compatible with the actions of the preceeding safety layers. The results have been published in the SESAR Innovation Days conference in Budapest in December 2022.
Project partners:
Research Organizations: NLR
Universities: TU Delft, ENAC, Linköpink University, University of Patras
Industry: NTT Data, Unifly
This project has received funding from the SESAR Joint Undertaking ( JU) under grant agreement No 101017702.