
Drones zullen een steeds grotere rol gaan spelen in onze maatschappij. Het wordt dus drukker in de lucht en des te belangrijker wordt de zogenoemde ‘situational awareness’. Voor een veilige operatie moet er altijd een goed overzicht zijn van wat er in de lucht gebeurt. De behoefte aan een duidelijk overzicht in drie dimensies geldt voor piloten en luchtverkeersleiders van het reguliere luchtverkeer, maar ook voor de gebruikers van de steeds vaker voorkomende onbemande systemen in de lucht, drones.
Over dit onderwerp ging SymAware, een Europees onderzoeksproject (oktober 2022 – april 2026) dat zich richtte op de ‘Awareness Inside’ Challenge van de European Innovation Council. In een consortium onder leiding van het Max Planck Institute for Software Systems in Duitsland is binnen SymAware een innovatief raamwerk ontwikkeld voor de situational awareness van steeds autonomer functionerende agents – een verzamelnaam voor robots, drones, en auto’s. Onderzocht werd hoe deze risico’s kunnen herkennen en effectief samenwerken met mensen om in complexe en dynamische omgevingen veilige operaties uit te kunnen voeren.
Binnen het project waren twee use cases: wegverkeer (geleid door Siemens) en droneverkeer (geleid door NLR). De inbreng van NLR stond onder leiding van senior scientist Sybert Stroeve van NLR. De bevindingen zijn beschreven in een wetenschappelijk artikel (gratis toegankelijk).
Te dicht bij elkaar
Wanneer onbemande drones door de lucht vliegen, worden ze vanaf de grond bestuurd door een dronepiloot. Die kan op de achtergrond gebruik maken van een DAA-systeem (detect and avoid). Meestal is er geen vuiltje aan de lucht, maar het kan af en toe voorkomen dat twee drones te dicht bij elkaar in de buurt dreigen te komen. In zulke gevallen moet het DAA-systeem een seintje geven.
Er bestaan op dit moment grofweg twee soorten richtinggevende boodschappen aan de dronepiloot. De eerste dient voor de zogeheten remain well clear (RWC)-begeleiding, waarmee de dronepiloot de mogelijkheden te zien krijgt hoe te sturen om ‘ruim uit de buurt’ te blijven. Bij RWC-begeleiding heeft de dronepiloot ongeveer twee à drie minuten beschikbaar tot aan het dichtste naderingspunt van de drones.
Wanneer twee drones toch dichter bij elkaar komen, wordt het dringender om in te grijpen. Het DAA-systeem geeft dan een zogeheten resolution advisory (RA) af, een dringend advies dat de dronepiloot onmiddellijk moet ingrijpen om een botsing te voorkomen.
Beter alternatief
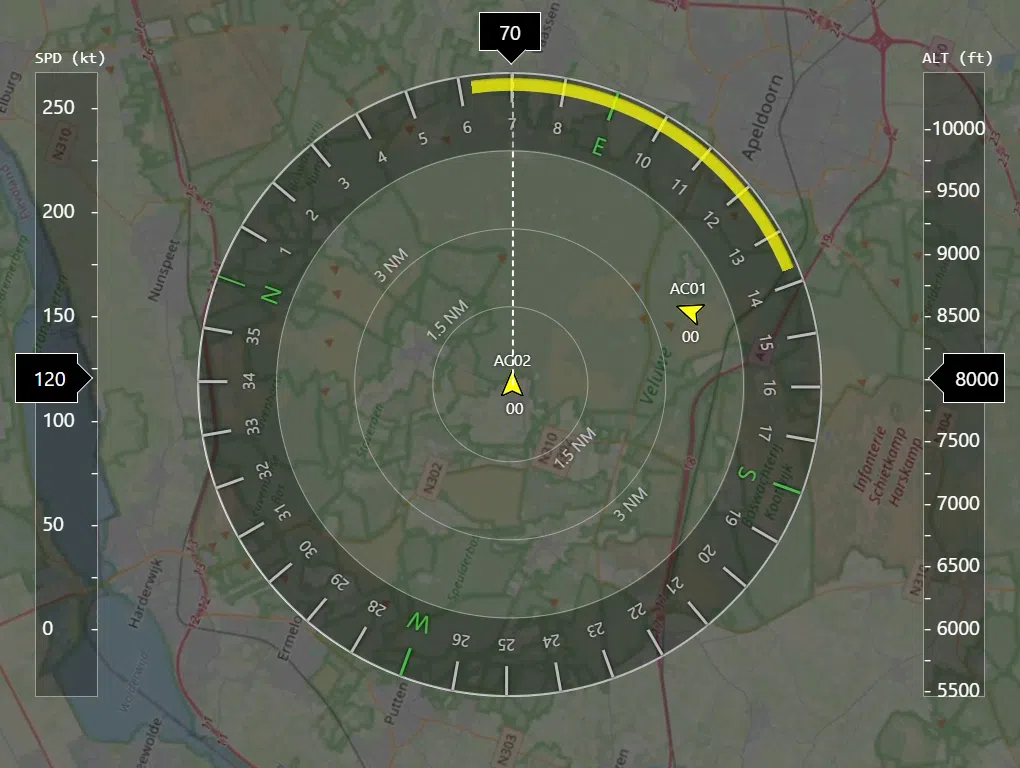
In project SymAware hebben de NLR-onderzoekers een beter alternatief bedacht voor de remain well clear-functie. Om de voordelen hiervan te begrijpen, volgt eerst een toelichting over bestaande DAA-systemen. Die werken meestal aan de hand van twee factoren: de onderlinge afstand tussen twee drones, en de individuele snelheden die ze hebben. Aan de hand daarvan wordt berekend wat onveilige routes zijn, en dus welke richting de dronepiloot de drone niet mag laten vliegen. Die ‘onveilige’ koers wordt op een display getoond met een gele band; zie de figuur hieronder en deze video.
Intentie
Deze aanpak heeft echter zijn beperkingen. Het belangrijkste probleem is dat de intentie van de andere drone niet wordt meegenomen; het DAA-systeem houdt geen rekening met waar die andere dronepiloot eigenlijk heen wil vliegen. Dat leidt in de praktijk niet alleen tot minder efficiënte oplossingen, maar soms zelfs tot problemen: Stroeve en collega’s schetsen die in hun paper.
Bijsturen
Treffend voorbeeld is wanneer twee drones onder een hoek van 45 graden (in een horizontaal vlak) op elkaar af vliegen. Wanneer de ene drone rechtdoor blijft gaan, zal de andere gaan bijsturen om de hoek tussen de twee te verkleinen. Dat lost weliswaar voor heel even het probleem op, maar een moment later is er alweer hetzelfde probleem: weer moet de drone bijsturen. En dat steeds weer opnieuw.
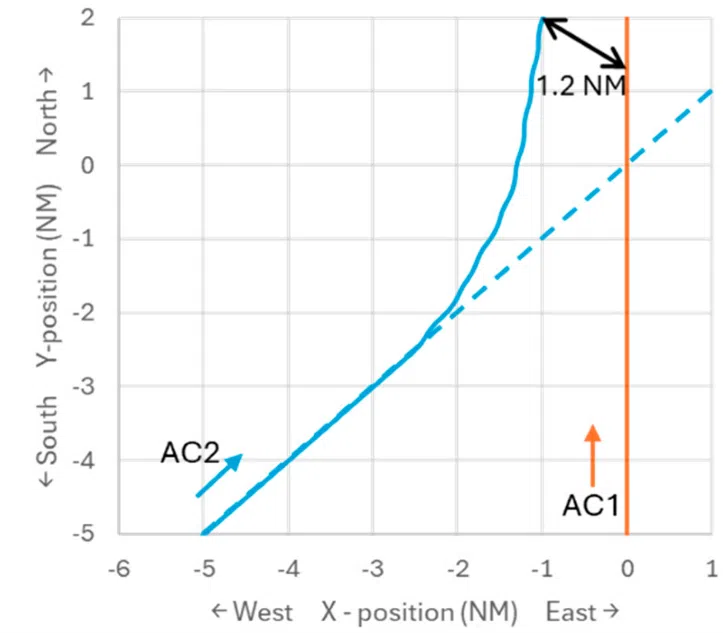
Achterlangs passeren
In de video van de simulaties is een andere situatie te zien. Twee drones zitten nu op een koers van negentig graden ten opzichte van elkaar. Ook hier adviseert het oude systeem dat de ene drone prima voorlangs kan passeren, maar dat levert even later alweer een nieuw probleem op. Uit het onderzoek bleek dat achterlangs passeren veel slimmer zou zijn. Op die manier zijn de piloten in één keer van het probleem af.
Padplanning
In het SymAware-project is een nieuw systeem ontwikkeld: A* DAA, genoemd naar de A*-padplanning die het gebruikt. Bij het zoeken van het beste pad doet A* twee dingen: het risico op een conflict verkleinen, én zorgen dat de drone weer op de eindroute uitkomt. Elke twintig seconden kan er worden bijgestuurd naar links of rechts. Verder gebruikt het A* DAA-systeem coördinatie tussen de drones, enigszins vergelijkbaar met de coördinerende rol van luchtverkeersleiders.
Route
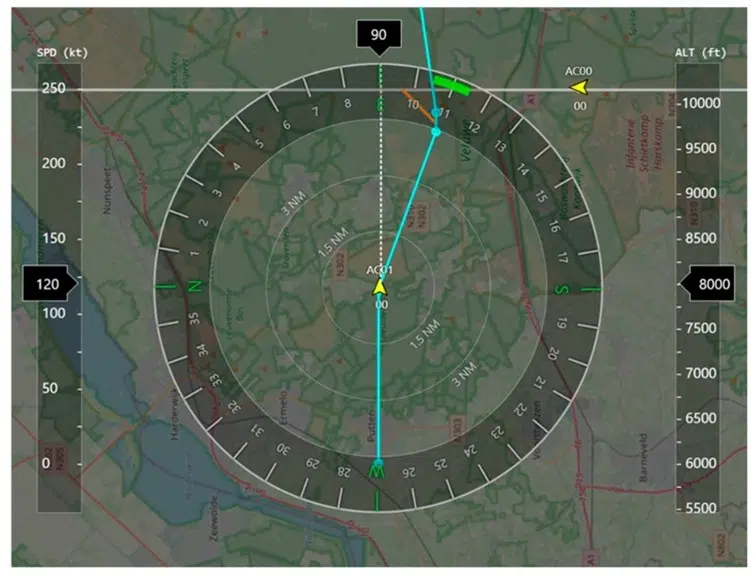
In tegenstelling tot bestaande DAA-systemen adviseert het aan de dronepiloot op de grond geen richtingen die vermeden dienen te worden, maar een route die gevolgd kan worden om op voldoende afstand tot het andere vliegtuig te blijven (zie onderstaande figuur en deze video). Accepteert die de geadviseerde route, dan stuurt de drone bij. Wanneer het advies wordt genegeerd, dan kan het conflict verergeren. ‘Overigens lenen de adviezen van het A* DAA-systeem zich er ook best voor om te worden geautomatiseerd’, zegt Stroeve. In de toekomst kan een drone dan zelf bijsturen na een dergelijk advies.
Vertrouwen
Binnen SymAware werden negen professionele dronepiloten ondervraagd over het nieuwe A* DAA-systeem in een vergelijking met een bestaand systeem. Acht hiervan hadden liever het nieuwe systeem, één had geen voorkeur. De voorstanders hadden er meer vertrouwen in, ervaarden minder risico en begrepen beter hoe een veilige passage werd ondersteund. Opbouwende feedback was er ook. Zo zou het in sommige omstandigheden goed zijn om een wat grotere separatieafstand tussen de drones aan te houden. Daarnaast zeiden sommige dronepiloten dat het handig zou zijn wanneer rond elke drone een boundary te zien zou zijn, een grafische weergave van het gebied dat een veilige afstand aangeeft.
In de simulaties van dit project is interactie met luchtverkeersleiders niet meegenomen. “De coördinerende rol zit in het systeem ingebakken”, zegt Stroeve. “In de toekomst zou je er voor kunnen kiezen dat de RWC-oplossing ook wordt gedeeld met de luchtverkeersleider; dat moet eenvoudig kunnen. Die zou dan kunnen instemmen met de voorgestelde wijziging van de routes.”
Vervolg
NLR gaat door met het verbeteren van detect and avoid-systemen. Het onderzoek binnen project SymAware richtte zich op grote drones, die ook op hoogten kunnen vliegen waar verkeersvliegtuigen vliegen. Vooral routes en manoeuvres in het horizontale vlak zijn bekeken. Toepassingen kunnen zowel zitten in het civiele als in het defensiedomein. “De dronepiloten die we ondervroegen, hadden verschillende achtergronden”, zegt Stroeve. “De opgedane inzichten zouden zelfs breder toepasbaar kunnen zijn dan alleen voor drones, misschien zelfs voor voertuigen op de grond.” Een ander aspect ter verbetering kan zijn om ook rekening te houden met gebieden waar een drone simpelweg niet mag komen, zoals militaire bases of luchthavens.
Kennisprogramma’s
Op tien belangrijke onderwerpen heeft NLR programma’s aangewezen waarin kennis verder wordt ontwikkeld. Dit onderzoek sluit aan bij de twee kennisprogramma’s ‘Veilige en concurrerende operatie’ en ‘Onbemand en autonoom’.

Het SymAware-project werd gefinancierd door de European Innovation Council.


