Research infrastructure
NLR’s research infrastructure comprises a diverse range of facilities and equipment, forming the foundation of our applied research. Our state-of-the-art facilities are accessible to companies and other research institutions, allowing for collaborative innovation. Explore our extensive facilities here and learn how they can support your project.
12 March 2025
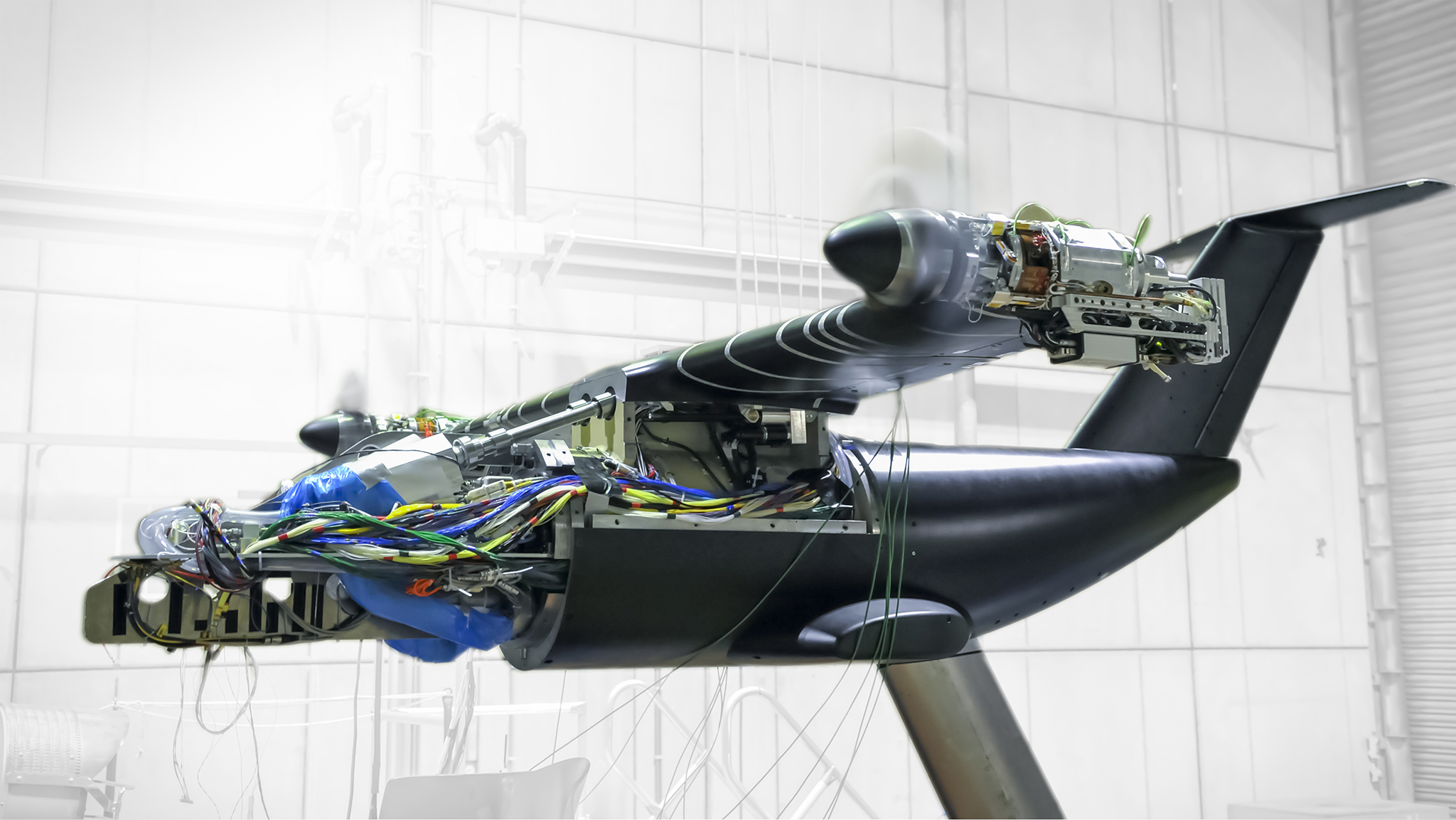
Advanced Mechanical Manufacturing Facility
Our Advanced Mechanical Manufacturing Facility specialises in high-tech, high-spec lightweight structural concepts for wind tunnel models in metal, laminates, and composites. We offer a comprehensive range of services, including product design, topology optimisation, production concept assessment, and manufacturing of prototype structures, smart wind tunnel models, and small production runs. By utilising 3D printing technology (metal […]

04 March 2025
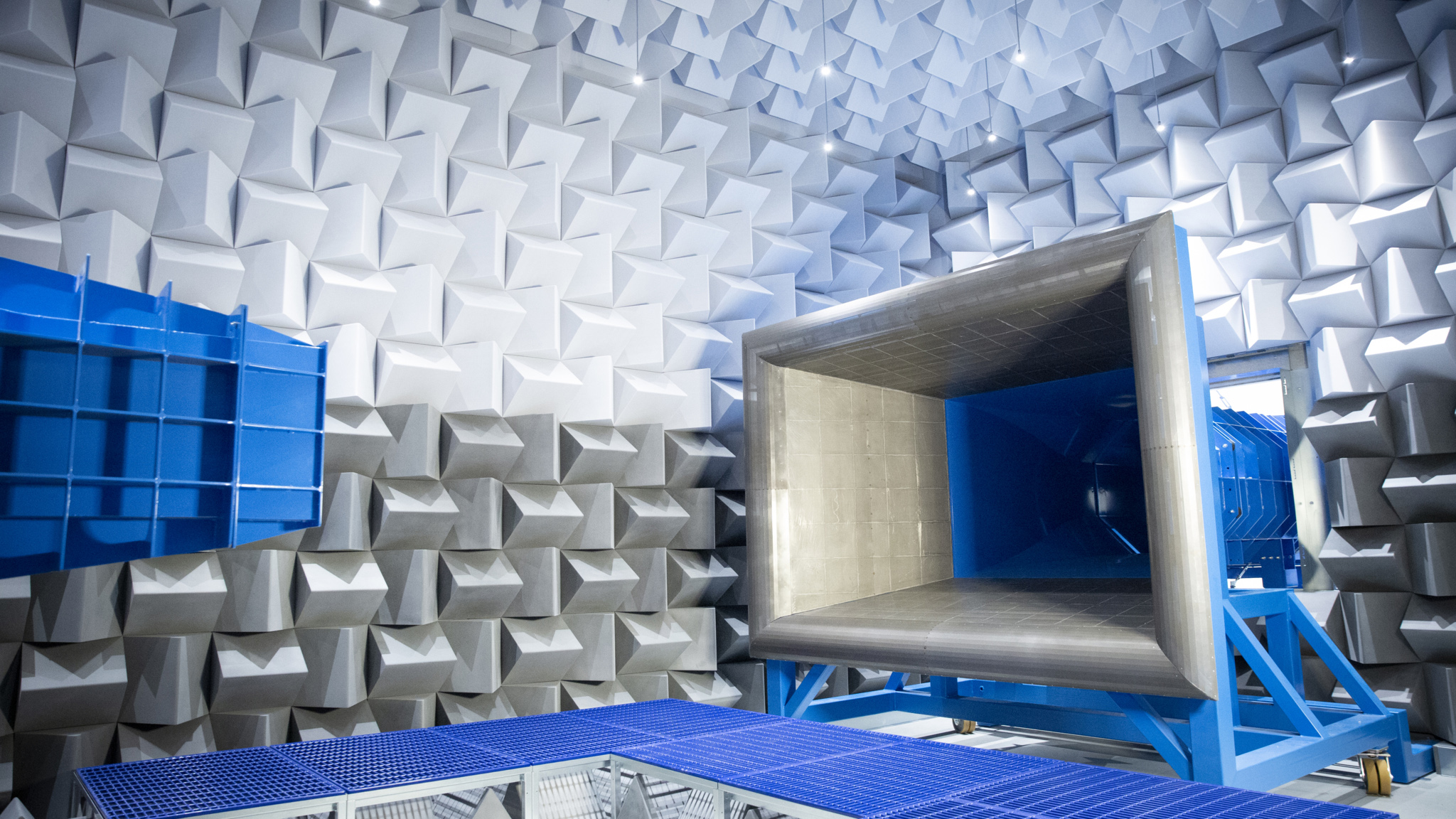
Aeroacoustic Wind Tunnel
The NLR Aeroacoustic Wind Tunnel (NLR-AWT) is a state-of-the-art facility dedicated to researching the sources of aero-acoustic noise and developing techniques to reduce aircraft noise. Our research focuses on the early development phase (low Technology Readiness Level) or aims to improve existing systems. Additionally, we develop advanced measurement methods to identify and quantify noise sources. […]
04 March 2025
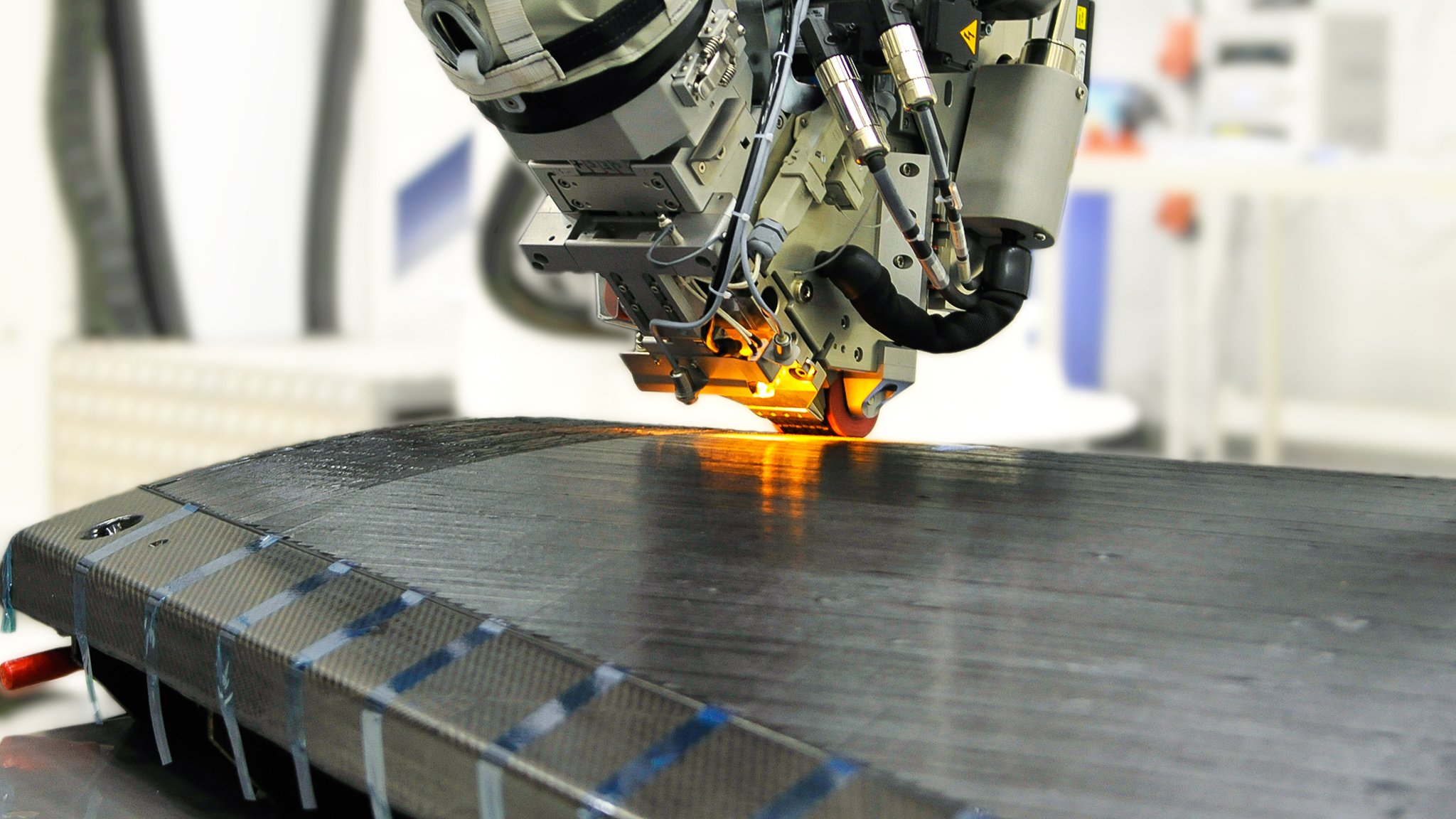
Automated Composites Manufacturing (ACM3)
The ACM3 Field lab (Automated Composites Manufacturing, Metal Manufacturing and Maintenance) is a world-class facility that offers high-tech equipment and expertise for the development of lightweight products. Its primary focus is on paving the way for automated manufacturing of advanced composite structures, with a strong emphasis on supporting the composites industry and companies that are […]

11 March 2025
Avionics Prototyping Environment (APERO)
The Avionics Prototyping Environment for Research and Operations (APERO) is a versatile and transportable research flight simulator designed to facilitate a range of applications, including avionics display design and evaluation, demonstration of innovative cockpit concepts, part-task training exercises, and networked flight simulation scenarios. Among other things, APERO can be used to test and evaluate: Main […]

04 March 2025
Electro Magnetic Compatibility facility
Materials and equipment used in aerospace applications have to meet a wide range of special requirements, mainly due to the specific environment in which aircraft and spacecraft have to perform reliably and safely. NLR’s extensive capabilities and expertise in the field of airworthiness certification is complemented with state-of-art research infrastructure for aerospace systems performance and […]
11 March 2025
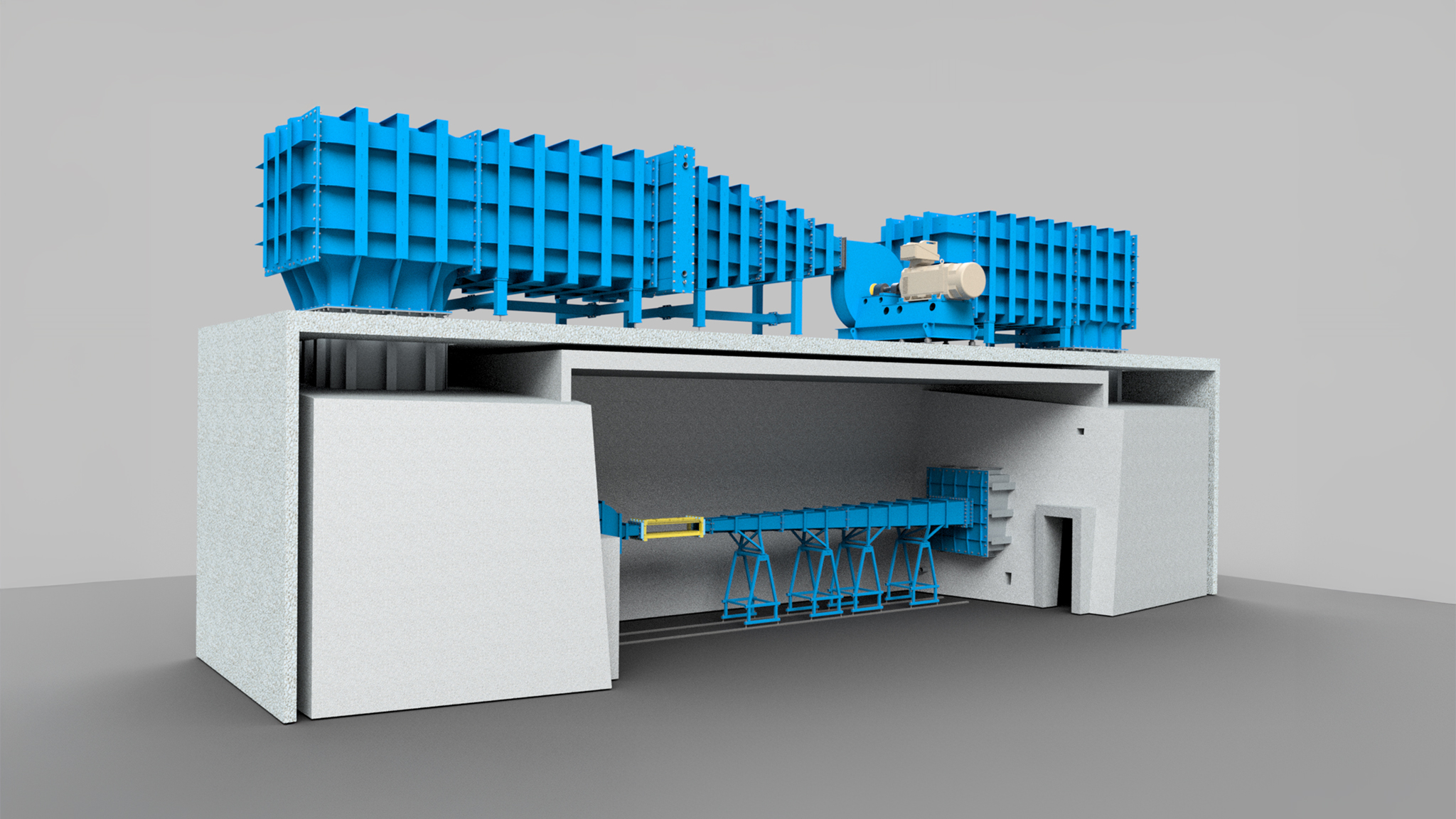
Flow Duct Facility
The Flow Duct Facility (NLR-FDF) contributes to research on noise reduction techniques to reduce aircraft noise. The research is carried out during the early development phase (low TRL) or to improve existing systems. The research is conducted during the early development phase (low TRL) or to improve existing systems. The FDF is a closed-loop wind […]

11 March 2025
Metal Additive Manufacturing Centre
The NLR Metal Additive Manufacturing Technology Centre (MAMTeC) covers more than 50 years of materials experience in aerospace applications, technology development and product innovation. NLR can help you develop the process more efficiently, from optimised parameters, post-processing approaches, evaluation of mechanical properties, design optimisation and process simulation through to the qualification and certification of metal–additive […]

11 March 2025
ATM real-time simulator (NARSIM)
NARSIM is a real-time, human in the loop (HITL) Air Traffic Control (ATC) simulator capable of simulating the full working environment and working conditions of air traffic controllers in detail. As such, it provides a platform for training, validation and conducting research in a controlled environment on all aspects of air traffic control and the […]

11 March 2025
NLR Drone Centre
The NLR Drone Centre provides a dedicated environment for conducting (experimental) flight tests, evaluations, and demonstrations of Unmanned Aircraft Systems (UAS) and sensor applications, as well as facilitating UAS concept development. The NLR Drone Centre in Marknesse has its own restricted airspace with the necessary authorisations and exemptions to facilitate these activities. It offers developers, […]

12 March 2025
Research aircraft: Cessna Citation II
NLR’s research aircraft are essential for testing new flight procedures and technologies. NLR operates two research aircraft: the Cessna Citation II and the electric Pipistrel Velis Electro. The Cessna Citation II research aircraft offers opportunities to perform a wide variety of flight test applications. Extensive modifications have turned this pressurised, twin-engined business jet into a […]

12 March 2025
Research aircraft: Pipistrel Velis Electro
NLR’s research aircraft are essential for testing new flight procedures and technologies. NLR operates two research aircraft: the Cessna Citation II and the electric Pipistrel Velis Electro. The Pipistrel Velis Electro is the first electrically powered aircraft to be certified in Europe in 2018. NLR has had this aircraft since the end of 2020, which […]
11 March 2025
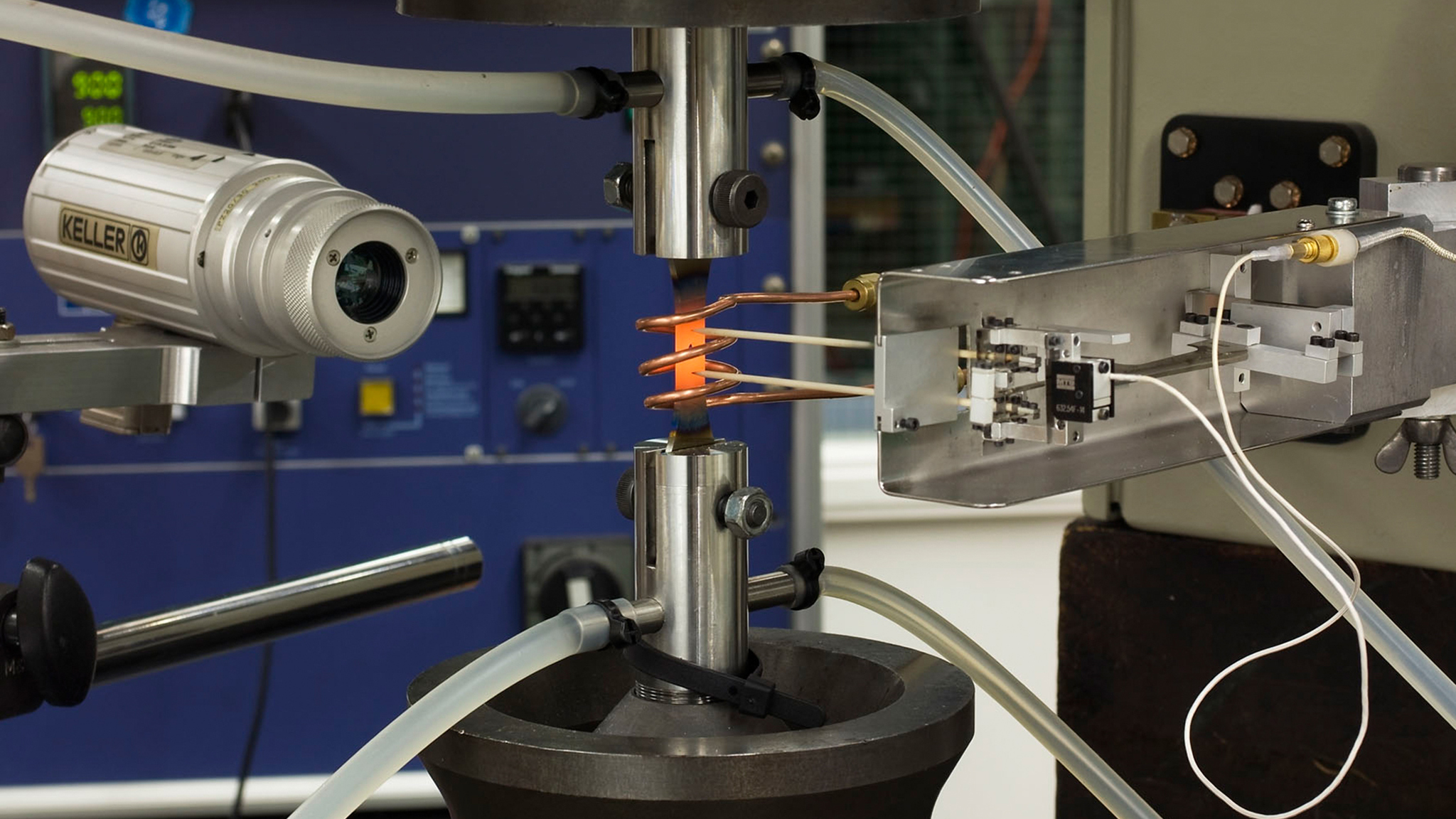
Test House structures and materials
NLR acts as a one-stop-shop for “Non-Standard” testing and certification of aircraft parts, structures and materials. The Test House facilitates inspection, testing, characterisation and failure analysis. This can be done on material level, coupon level, component level or full-scale level. We can assist you in manufacturing and machining your test articles and help you to […]

04 March 2025
Thermal Vacuum facility
Materials and equipment used in aerospace applications have to meet a wide range of special requirements, mainly due to the specific environment in which aircraft and spacecraft have to perform reliably and safely. NLR’s extensive capabilities and expertise in the field of airworthiness certification is complemented with state-of-art research infrastructure for aerospace systems performance and […]
04 March 2025
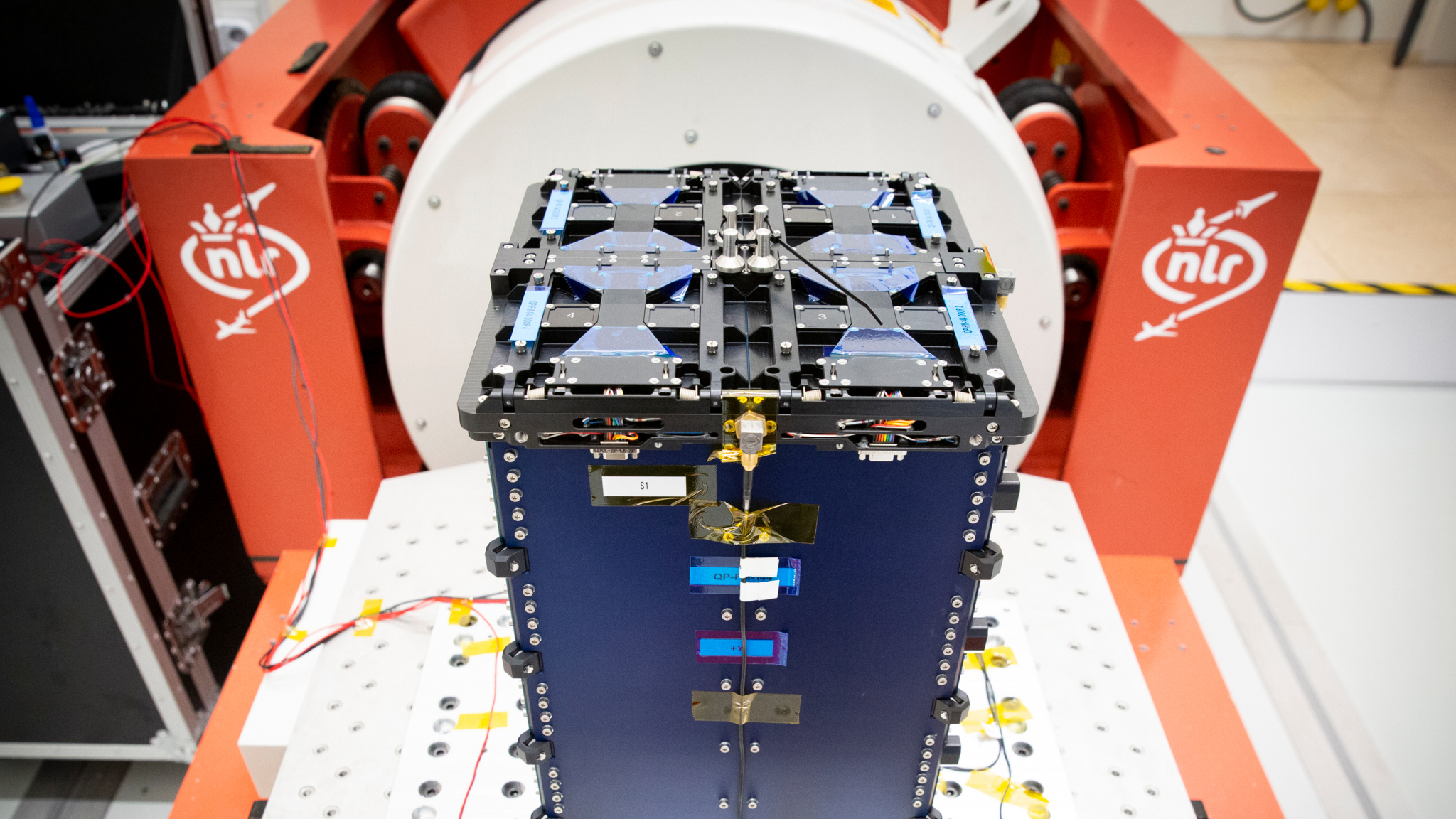
Vibration and Shock Test facility
Materials and equipment used in aerospace applications have to meet a wide range of special requirements, mainly due to the specific environment in which aircraft and spacecraft have to perform reliably and safely. NLR’s extensive capabilities and expertise in the field of airworthiness certification is complemented with state-of-art research infrastructure for aerospace systems performance and […]