
Drones are expected to play an increasingly important role in society. As a result, airspace is becoming busier, making so-called situational awareness ever more important. Safe operations require a clear overview of what is happening in the air at all times. The need for a clear three-dimensional overview not only applies to pilots and air traffic controllers in conventional aviation, but also to operators of the growing number of unmanned aerial systems, or drones.
This was the focus of SymAware, a European research project (October 2022 – April 2026) addressing the ‘Awareness Inside’ Challenge of the European Innovation Council. Within a consortium led by the Max Planck Institute for Software Systems in Germany, an innovative framework was developed for the situational awareness of increasingly autonomous agents — a collective term for robots, drones and vehicles. The project investigated how such systems can recognise risks and collaborate effectively with humans in order to conduct safe operations in complex and dynamic environments.
The project consisted of two use cases: road traffic (led by Siemens) and drone traffic (led by NLR). NLR’s contribution was headed by senior scientist Sybert Stroeve of NLR. The findings were recently published in a scientific article.
Too close together
When unmanned drones fly through the air, they are controlled from the ground by a drone pilot. The pilot may also use a detect-and-avoid (DAA) system. Most of the time, operations run smoothly, but occasionally two drones may come dangerously close to one another. In such cases, the DAA system must issue a warning.
At present, there are roughly two types of guidance messages provided to the drone pilot. The first supports so-called remain well clear (RWC) guidance, which shows the pilot the available manoeuvring options to remain “well clear” of other traffic. With RWC guidance, the pilot generally has about two to three minutes before the drones reach their closest point of approach.
When two drones are on a collision course, however, , more urgent intervention is required. The DAA system then issues a so-called resolution advisory (RA), an urgent warning instructing the drone pilot to take immediate action to avoid a collision.
A better alternative
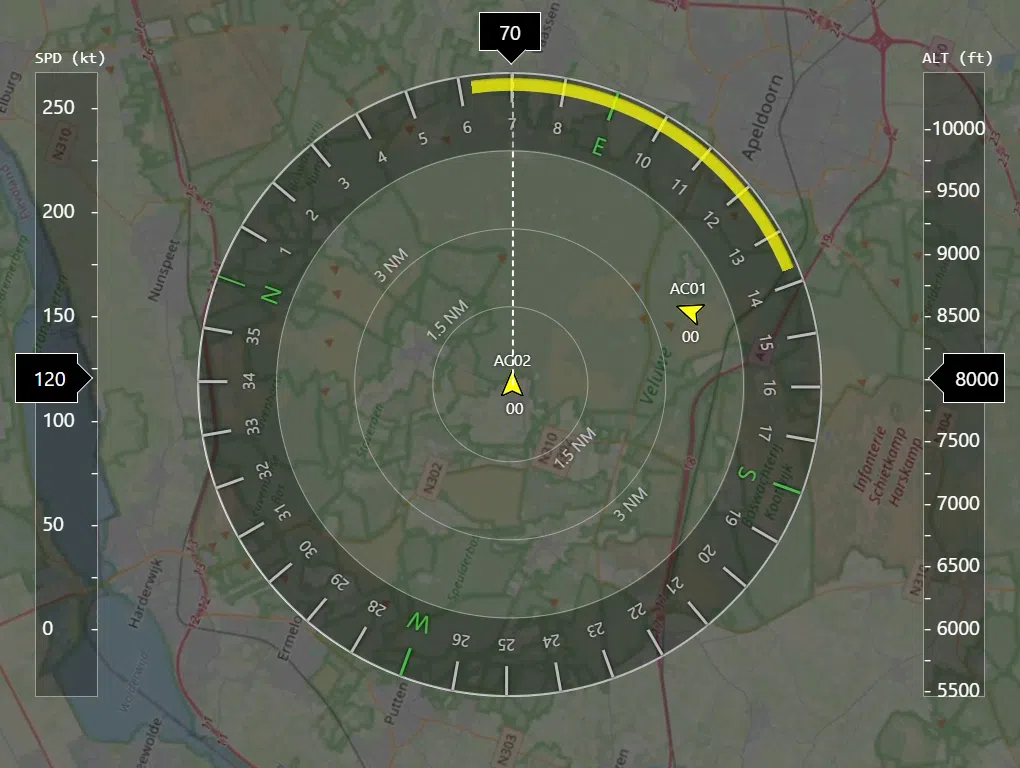
Within the SymAware project, NLR researchers developed an improved alternative to the remain well clear function. To appreciate its advantages, it is helpful to understand how existing DAA systems work first. These systems typically rely on two factors: the distance between two drones and their individual velocities. Based on this information, the system calculates unsafe trajectories and determines which directions the pilot should avoid flying in. These “unsafe” headings are highlighted in yellow on a screen. See the figure below and watch this video.
Intent
However, this approach has its limitations. The main issue is that the intention of the other drone is not taken into account; the DAA system does not consider where the other drone pilot actually intends to fly. In practice, this not only results in less efficient solutions, but can sometimes even create problems, as Stroeve and his colleagues describe in their paper.
Continuous course corrections
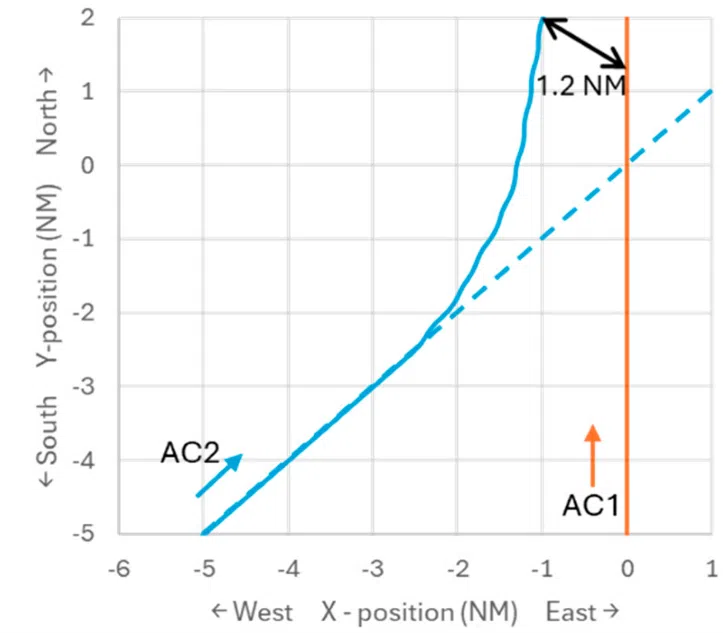
A striking example occurs when two drones approach each other at a 45-degree angle in the horizontal plane, see the image below. If one drone (the red line) continues flying straight ahead, the other will alter course to reduce the angle between them. While this briefly resolves the problem, the same issue reappears moments later, requiring another course correction, and so on, repeatedly (shown as the blue trajectory).
Passing behind instead
Another scenario shown in the simulation videos involves two drones flying on crossing paths at a 90-degree angle. Here too, the existing system advises that one drone can safely pass in front of the other, but this soon creates a new conflict. The research demonstrated that passing behind the other drone would be far more effective. This approach allows pilots to resolve the conflict in a single manoeuvre.
Path planning
A new system has been developed as part of the SymAware project: it is called ‘A* DAA’, named after the A* path-planning algorithm it uses. In searching for the optimal path, A* pursues two objectives: reducing the risk of conflict and ensuring that the drone eventually returns to its intended route. The system can recommend course adjustments to the left or right every twenty seconds. In addition, the A* DAA system incorporates coordination between drones, somewhat comparable to the coordinating role of air traffic controllers.
Route-based guidance
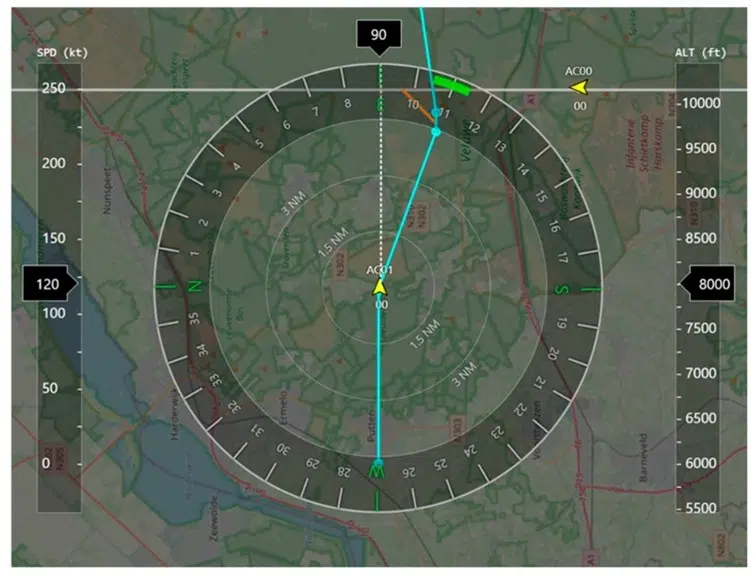
Unlike existing DAA systems, the new system does not simply advise the ground-based drone pilot which headings to avoid. Instead, it provides a route that can be followed in order to maintain sufficient separation from the other aircraft (see the figure below and watch this video).
If the pilot accepts the advised route, the drone adjusts its course accordingly. Ignoring the advice, however, may worsen the conflict. “Moreover, the recommendations generated by the A* DAA system are also highly suitable for automation,” says Stroeve. “In the future, a drone could automatically adjust its own course based on this advice.”
Trust
Within the SymAware project, nine professional drone pilots were interviewed about the new A* DAA system and asked to compare it with an existing system. Eight preferred the new system, while one expressed no preference. Supporters reported greater confidence in the system, perceived lower levels of risk and had a better understanding of how safe passage was being achieved. There was also constructive feedback. For example, some participants suggested that in certain situations, a greater separation distance between drones would be preferable. Others indicated that it would be helpful to display a boundary around each drone, a graphical representation of the area defining safe separation.
The project simulations did not include interaction with air traffic controllers. “The coordinating role is built into the system itself, ” says Stroeve. “In the future, the remain well clear solution could also be shared with air traffic control; that should be relatively straightforward. Controllers could then approve the proposed route adjustments.”
Next steps
NLR will continue improving detect-and-avoid systems. The research within the SymAware project focused on large drones capable of operating at altitudes shared with commercial aircraft. The work primarily examined routes and manoeuvres in the horizontal plane. Applications may exist in both the civil and defence domains. “The drone pilots we interviewed came from different professional backgrounds,” Stroeve says. “The insights gained may have wider relevance, beyond drones, perhaps even to ground vehicles.” Another potential area for improvement would be to incorporate restricted areas into the system, such as military bases or airports where drones are simply not permitted to enter.
Knowledge programmes
NLR has identified ten key themes within which knowledge development programmes are being pursued. The research described above aligns with the NLR knowledge programmes ‘Safe and Competitive Operations’ and ‘Unmanned and Autonomous’.

The SymAware project was funded by the European Innovation Council.


